Experiment Maps
Discretized grid maps used in simulations and real-world experiments. Each map is shown as a grid image alongside its real-world satellite location. Map files are available for download below.
Environments
FME — Facultat de Matemàtica i Estadística
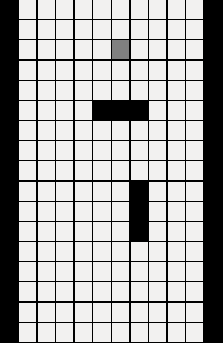
- Grid size
- 17 × 12 cells
- Real size
- 17 m × 12 m
- Cell size
- 1 m × 1 m
- Accessible area
- 170 m²
- Download
- fme.txt
BRL — Barcelona Robot Lab

- Grid size
- 80 × 15 cells
- Real size
- 80 m × 15 m
- Cell size
- 1 m × 1 m
- Accessible area
- 710 m²
- Download
- brl.txt
Telecos Square — UPC Campus
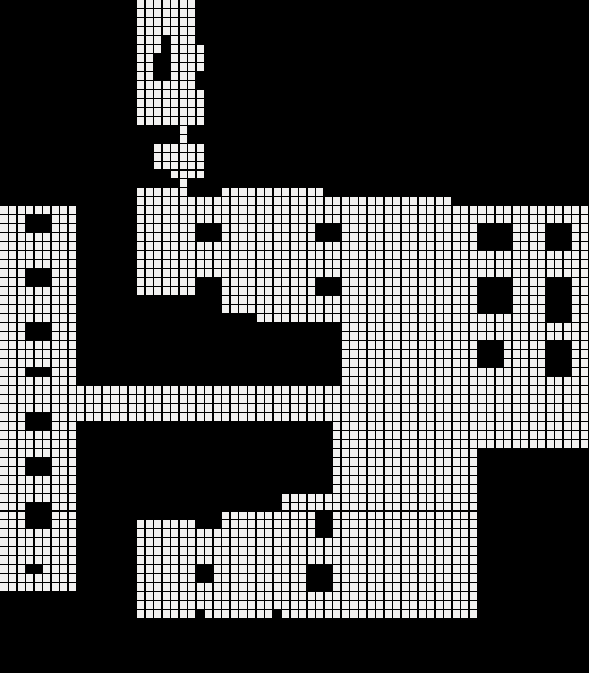
- Grid size
- 75 × 69 cells
- Real size
- 60 m × 55 m
- Cell size
- 0.8 m × 0.8 m
- Accessible area
- 1,400 m²
- Download
- telecos.txt
Map File Format
Each .txt file encodes the map as a comma-separated matrix:
- Number of columns
- Number of rows
- Matrix of rows × columns with values:
0— free cell1— obstacle (robot cannot pass or see through)2— base cell (free, used as start in hide-and-seek)
Example — 3 columns, 2 rows, obstacle at (0,0) and (0,1), base at (1,1):
3,2,
100
120